The motivation
Let's try one of the best low power bluetooth and nfc SoCs on the market.
The ordering
First we need a development board and a programmer.
So we search some sources for nRF52832 development boards:
(all pricerates today 2016.09.23)
digikey: ~39$ (not including tax and shipping, programmer included)
mouser: ~39$ (not including tax and shipping, programmer included)
aliexpress: ~20$ (including shipping, for me no tax and custom dues, no sensors, no programmer)
Now we search for a programmer:
digikey: ~90$ (not including tax and shipping)
mouser: ~90$ (not including tax and shipping)
aliexpress: ~2$ (including shipping)
Sorry my development budget is small. So give aliexpress a try. 3 weeks later (cheap shipping included) we have a development suite ready.
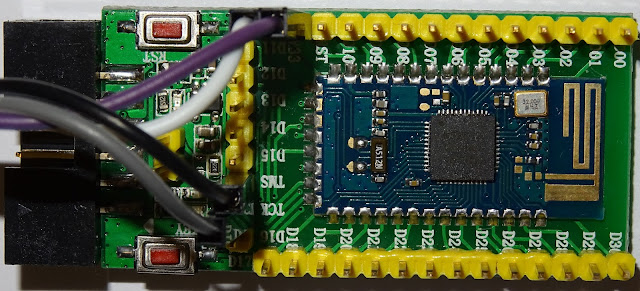 |
| aliexpress nRF52832 board |
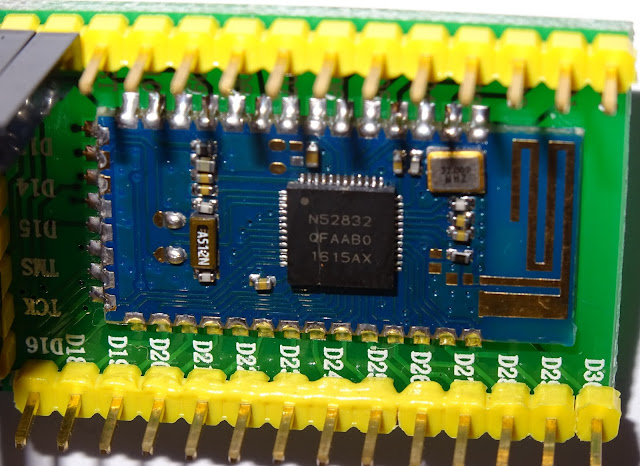 |
| nRF52832-QFAA SoC ARM Cortex M4 |
 |
| ST-Link V2 Programmer (genuine? work!) |
The Hardware
The seller give no instruction for the board so we have to use some inspection and a continuity tester to follow the traces with help from nordics nRF52832-QFAA
reference layout. So we find the Pins for SWDIO and SWCLK -> SWCLK goes to TCK and SWDIO goes to TMS and we use 3.3V and GND.
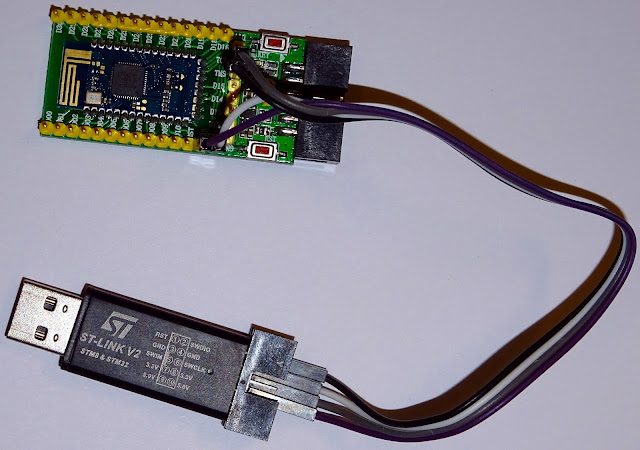 |
| ST-Link V2 and nRF52832 wired up |
The Software
- ST-Link V2
I use ubuntu 16.04 so the ST-Link V2 don't PnP out of the box, we need some more packages:
sudo apt-get install git
sudo apt-get install autoconf
sudo apt-get install libusb-1.0-0-dev
Then we build the drivers for the ST-Link V2 from source:
git clone https://github.com/texane/stlink stlink.git
cd stlink.git/
./autogen.sh
./configure
make
Then we copy the driver and udev rules:
sudo cp st-* /usr/bin
find . -name "*.rules"
sudo cp ./etc/udev/rules.d/49-stlinkv2.rules /etc/udev/rules.d
And activate the udev rules:
sudo udevadm control --reload-rules
sudo udevadm trigger
Let's check:
lsusb
Bus 001 Device 021: ID 0483:3748 STMicroelectronics ST-LINK/V2
dmesg
[0] usb 1-7: new full-speed USB device number 21 using xhci_hcd
[0] usb 1-7: New USB device found, idVendor=0483, idProduct=3748
[0] usb 1-7: New USB device strings: Mfr=1, Product=2, SerialNumber=3
[0] usb 1-7: Product: STM32 STLink
[0] usb 1-7: Manufacturer: STMicroelectronics
[0] usb 1-7: SerialNumber: 6
- openocd
Now we need openocd to use the programmer to flash our nRF52832 firmware:
git clone git://git.code.sf.net/p/openocd/code openocd-code
And we need some patches for the nRF52832 (more info on
devzone.nordicsemi.com and
openocd.zylin.com):
git pull http://openocd.zylin.com/openocd refs/changes/15/3215/2
Then i added to openocd-code/src/flash/nor/nrf52.c in line 133 to fit my nRF52832 hardware:
{
.hwid = 0x00C7,
.variant = "QFN48",
.build_code = "B00",
.flash_size_kb = 512,
},
Let's build and install openocd:
cd openocd-code/
./bootstrap
./configure
make
sudo make install
An openocd config-file (i.e. openocd_nrf52.cfg) can look like this:
#nRF52832 Target
source [find interface/stlink-v2.cfg]
transport select hla_swd
source [find target/nrf52.cfg]
And test our board:
openocd -d2 -f openocd_nrf52.cfg
Open On-Chip Debugger 0.10.0-dev-00322-g406f4d1-dirty (2016-09-23-11:47)
Licensed under GNU GPL v2
For bug reports, read
http://openocd.org/doc/doxygen/bugs.html
debug_level: 2
Info : The selected transport took over low-level target control. The results might differ compared to plain JTAG/SWD
adapter speed: 10000 kHz
Info : Unable to match requested speed 10000 kHz, using 4000 kHz
Info : Unable to match requested speed 10000 kHz, using 4000 kHz
Info : clock speed 4000 kHz
Info : STLINK v2 JTAG v17 API v2 SWIM v4 VID 0x0483 PID 0x3748
Info : using stlink api v2
Info : Target voltage: 3.273018
Info : nrf52.cpu: hardware has 6 breakpoints, 4 watchpoints
Connect with telnet and cleanup our chip (get rid of all test stuff):
telnet localhost 4444
Trying 127.0.0.1...
Connected to localhost.
Escape character is '^]'.
Open On-Chip Debugger
> reset halt
nrf52.cpu: target state: halted
target halted due to debug-request, current mode: Thread
xPSR: 0x01000000 pc: 0x00000b58 msp: 0x20010000
> nrf52 mass_erase
> reset
> exit
Connection closed by foreign host.
- GNU ARM Compiler
Next step get the GNU ARM Compiler to build our firmware:
Download ready packages from
launchpad.net.
I use this linux version
gcc-arm-none-eabi-5_3-2016q1-20160330-linux.tar.bz2
Unpack with
tar xvjf gcc-arm-none-eabi-5_3-2016q1-20160330-linux.tar.bz2
- Nordic SDK 12.0.0
Download the package from
developer.nordicsemi.com:
actual release
nRF5_SDK_12.0.0_12f24da.zip
and unpack:
unzip nRF5_SDK_12.0.0_12f24da.zip
The Firmware
Let's start with blinky (all sourcecode available in
github.com/pcbreflux) :
On our nRF52832 development board there are two useable LEDs. After some tracing we discover they are on GPIO pin 30 and GPIO pin 31.
So our C - program can look like this:
#include <stdlib.h>
#include "nrf_delay.h"
#include "nrf_gpio.h"
const uint32_t led_pin1 = 31;
/**
* @brief Function for application main entry.
*/
int main(void) {
// setup
// Configure LED-pin as outputs and clear.
nrf_gpio_cfg_output(led_pin1);
nrf_gpio_pin_clear(led_pin1);
// loop
// Toggle LED.
while (true) {
nrf_gpio_pin_toggle(led_pin1);
nrf_delay_ms(1000); // 0.5 Hz
}
}
Now we need one Makefile:
TEMPLATEROOT = ..
# compilation flags for gdb
CFLAGS += -O0 -g
CFLAGS += -DBOARD_CUSTOM
CFLAGS += -DNRF52832
ASFLAGS += -g
ASMFLAGS += -DBOARD_CUSTOM
ASMFLAGS += -DNRF52832
LDSCRIPT = $(TEMPLATEROOT)/blank_nrf52832_QFAA.ld
# object files
OBJS = system_nrf52.o main.o
# include common make file
include $(TEMPLATEROOT)/Makefile.common
For Makefile.common see
github.com/pcbreflux.
And our linker-file (blank_nrf52832_QFAA.ld):
SEARCH_DIR(.)
GROUP(-lgcc -lc -lnosys)
MEMORY
{
FLASH (rx) : ORIGIN = 0x0, LENGTH = 0x80000
RAM (rwx) : ORIGIN = 0x20000000, LENGTH = 0x10000
}
SECTIONS
{
.fs_data :
{
PROVIDE(__start_fs_data = .);
KEEP(*(.fs_data))
PROVIDE(__stop_fs_data = .);
} > RAM
} INSERT AFTER .data;
INCLUDE "nrf5x_common.ld"
Build the firmware
blinky.hex:
make
...
'/home/pcbreflux/nordic/gcc-arm-none-eabi-5_3-2016q1/bin/arm-none-eabi-gcc' -Xlinker -Map=_build/blinky.map -mthumb -mabi=aapcs -L/home/pcbreflux/nordic/nRF5_SDK_12.0.0/components/toolchain/gcc -T../blank_nrf52832_QFAA.ld -mcpu=cortex-m4 -Wl,--gc-sections --specs=nano.specs -lc -lnosys -o _build/blinky.out _build/system_nrf52.o _build/main.o _build/gcc_startup_nrf52.o
'/home/pcbreflux/nordic/gcc-arm-none-eabi-5_3-2016q1/bin/arm-none-eabi-objcopy' -O binary _build/blinky.out _build/blinky.bin
'/home/pcbreflux/nordic/gcc-arm-none-eabi-5_3-2016q1/bin/arm-none-eabi-objcopy' -O ihex _build/blinky.out _build/blinky.hex
and flash
blinky.hex to our nRF52832 development board:
make flash
...
** Programming Started **
auto erase enabled
Info : nRF51822-QFN48(build code: B00) 512kB Flash
Warn : using fast async flash loader. This is currently supported
Warn : only with ST-Link and CMSIS-DAP. If you have issues, add
Warn : "set WORKAREASIZE 0" before sourcing nrf52.cfg to disable it
nrf52.cpu: target state: halted
target halted due to breakpoint, current mode: Thread
xPSR: 0x61000000 pc: 0x2000001e msp: 0x20010000
wrote 4096 bytes from file _build/blinky.hex in 0.207181s (19.307 KiB/s)
** Programming Finished **
** Verify Started **
nrf52.cpu: target state: halted
target halted due to breakpoint, current mode: Thread
xPSR: 0x61000000 pc: 0x2000002e msp: 0x20010000
verified 3120 bytes in 0.041079s (74.171 KiB/s)
** Verified OK **
The
nRF51822-QFN48 is just a mislead in our openocd patch (see nrf52.c at line 404).
Summary
Practical demonstration can be found on youtube
https://youtu.be/dB4xIs0-Kb4.












































